
What is Minla HDW?
Minla HDW allows you to control your ArduPilot based flight controller (Pixhawk, Navio, APM, etc.) over internet.
You can control your RC model (rover, drone, boat, etc.) from Mavlink compatible ground control station (Mission Planner, QGroundControl, etc.) over mobile 3G/4G internet connection. FPV (First Person View) quality video stream from Minla HDW internal camera is delivered directly to ground control station. No regular radio equipment (2.4GHz, 5.8GHz, etc.) is required to operate rc model. Just 3G/4G mobile network.
How does it work?
Minla HDW demo:
Minla HDW tech spec
Microprocessor:
- 1GHz ARM CPU
Sensors:
- 5 megapixel camera
Interfaces:
- WiFi
- 4-pin power/serial connection to flight controller
Power requrements:
- +5V DC from flight controller
- 550 mA max current
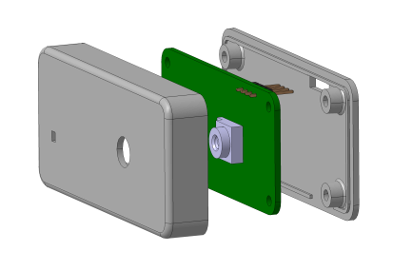
Weight and dimensions:
- Weight: 29g
- Width x Length x Thickness: 75x35x13 mm
Operating parameters:
- FPV video: H264, color, 25 fps, 0.1-0.5 sec end-to-end latency*
- FPV video resolution: 720x480
* Latency and quality depends on 2G/3G/4G mobile signal strength
Features:
- Flight controller support: Ardupilot based flight controllers (Pixhawk, Navio, Navio2, APM, etc.)
- Ground control stations support: Mission Planner, QGroundControl
- Real time video is sent directly to ground control station HUD over mobile 3G/4G link
- Mavlink V1 data is transparently routed from GCS to flight controller and back over mobile 3G/4G link
- Configuration and control (both auto and manual) of RC model over mobile 3G/4G link
- Autopilot configuration (flight plan, waypoint, etc.) over internet
- Can be used as backup mobile internet channel to regular radio link
- Uses Wifi-3G/4G routers to connect to internet. Autoreconnects when 3G/4G signal is lost
- Optionally 3G/4G usb modems can be used to connect to network however it is not advised option due to high power consumption of most of usb modems and possible connection stability issues